|
The locomotion of strombid gastropods has been
studied extensively since the mid 1800’s (Adams
1848; Colton 1905; Crozier 1919; Parker 1922;
Kohn 1965; Berg 1973). This is likely due to its
interesting and unique mechanism. Most
gastropods glide slowly across a substrate by
passing muscular waves over the foot, whereas
strombids propel themselves forward in a rapid
leaping motion (Berg 1973).
As compared with other gastropods, the feet of
strombids are rather peculiarly shaped, and can
be divided into 3 distinct sections (Berg 1973).
Anteriorly they have the form of a broad, flattened
finger which can be applied very closely to the
substrate (See Figure 1). The second section
is smooth and rounded at the sides, and rarely
comes in contact with the substrate during
locomotion. Finally, in the posterior section of the
foot tapers off, carrying at its hind end a long,
dark-brown, pointed operculum (See figure 2). This
is used to dig into the substrate and provide a solid
anchor from which the foot can extend posteriorly
and propel the shell forward. Following a forward
shell thrust or "leap", the foot is retracted back
under the shell to its original starting position.
From here the leaping mechanism can be repeated
to achieve successive leaps and forward locomotion.
|
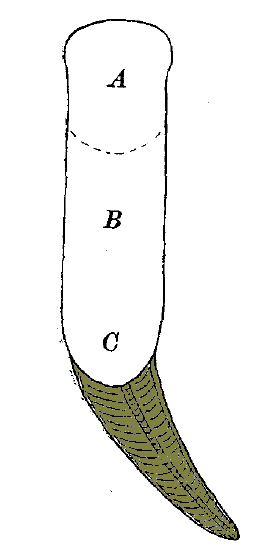
Figure 1: Ventral view of
strombid foot. Adapted from
Parker (1922). |